
This is what the Doorbell device looks like while on, with the lights and buzzer (not audible) both running.
This is what the Doorbell device looks like while on, with the lights and buzzer (not audible) both running.
For my final project in HCDE 439, I designed and built an alarm device called Doorbell. This device is designed to recognize movement by using an ultrasonic sensor which can detect changes in distance, and then triggers a toggleable alarm and light response. The alerts can be toggled by pressing the "M" key on the connected computer. I started this project as a basic alarm device, and realized that it could theoretically be used for various applications that need me to be aware of motion or changing distances.
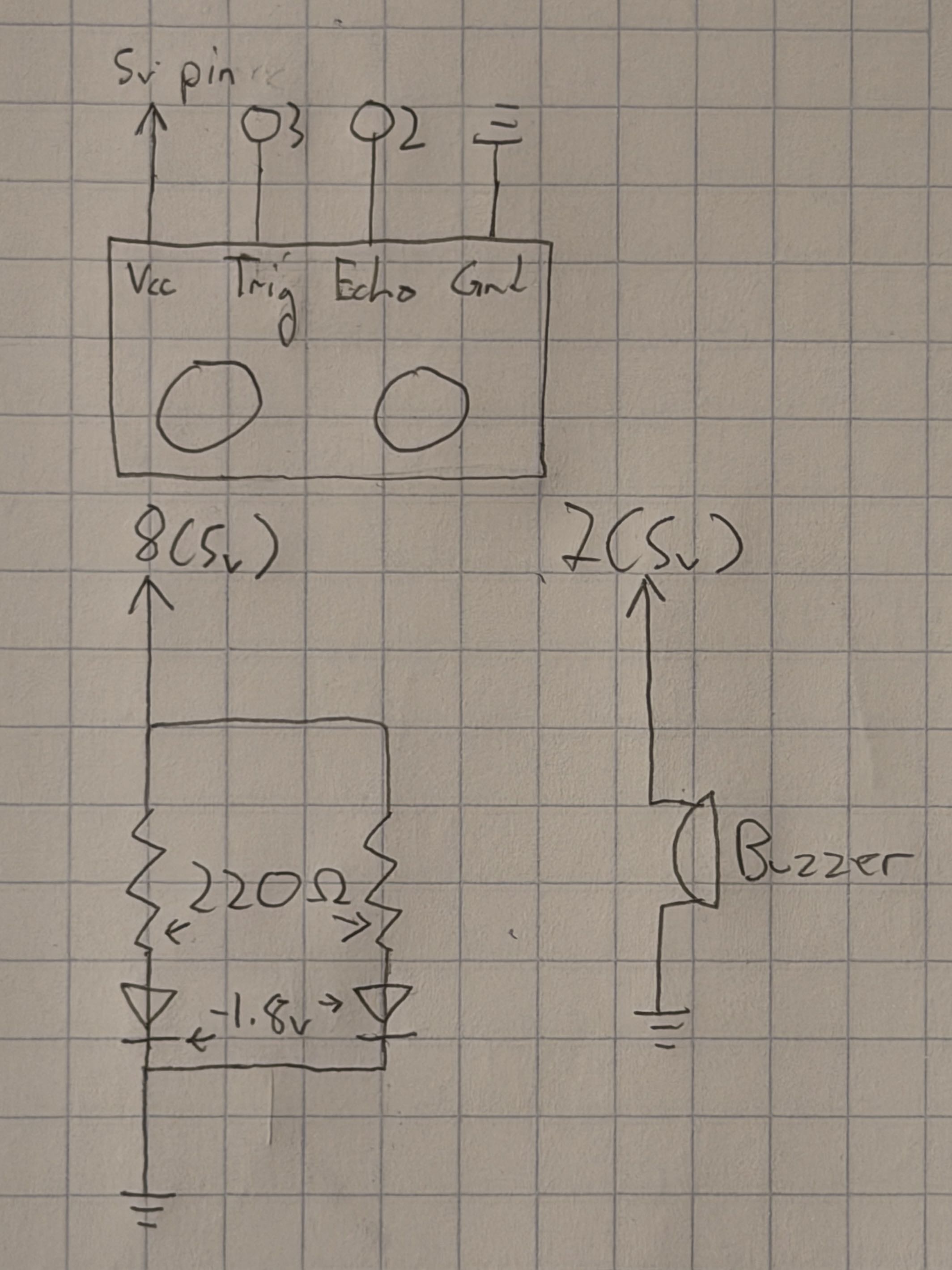 This diagram represents the device's circuitry. The ultrasonic sensor is connected to
digital pins to send data to the Arduino, which in turn controls the alarm lights
and buzzer. The green LEDs are controlled by a digital output which turns on or off,
and have an ideal maximum current of ~20 mA. Using Ohm's law to calculate an ideal
resistance gets the following value:
This diagram represents the device's circuitry. The ultrasonic sensor is connected to
digital pins to send data to the Arduino, which in turn controls the alarm lights
and buzzer. The green LEDs are controlled by a digital output which turns on or off,
and have an ideal maximum current of ~20 mA. Using Ohm's law to calculate an ideal
resistance gets the following value: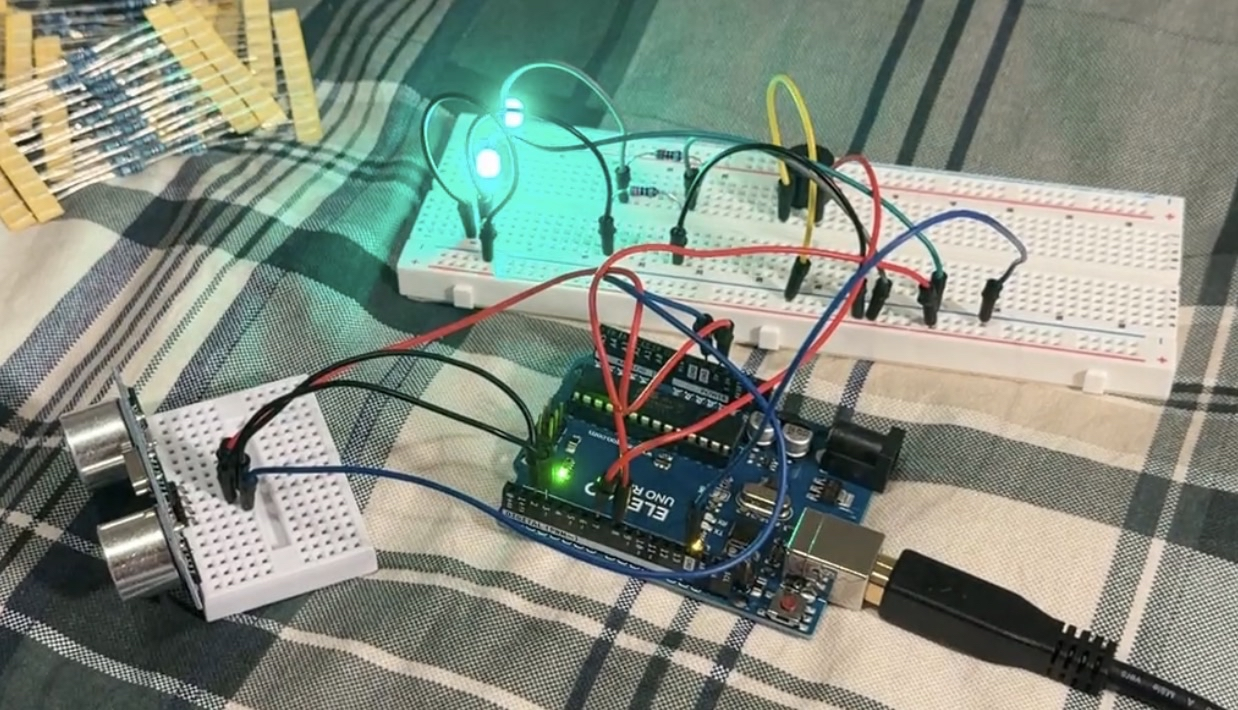
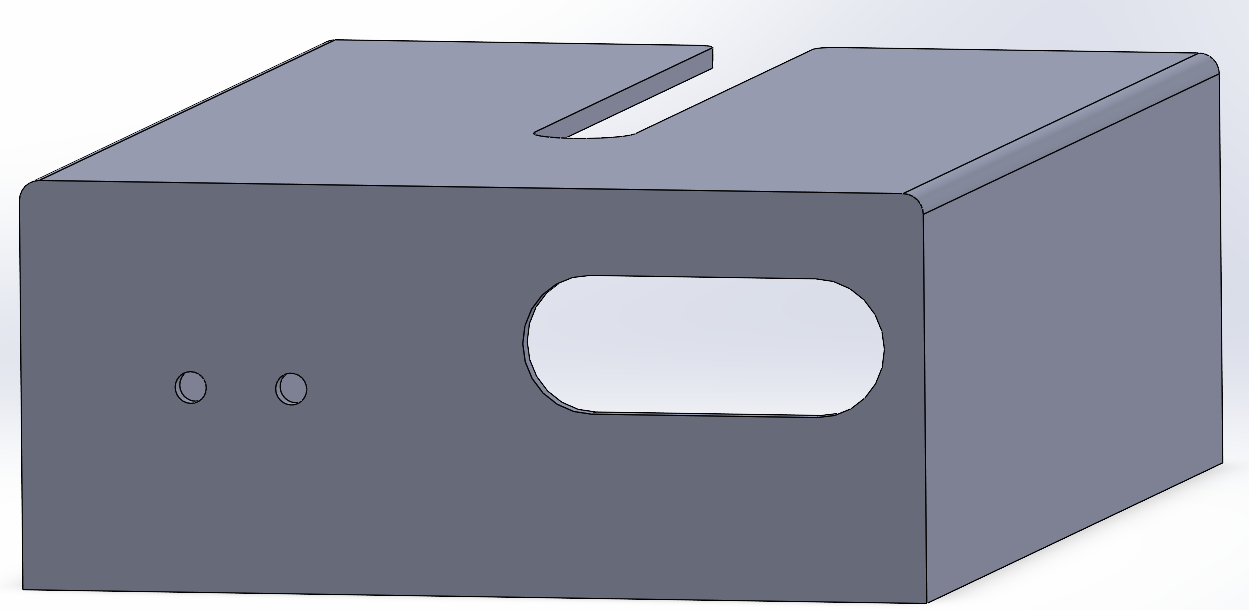
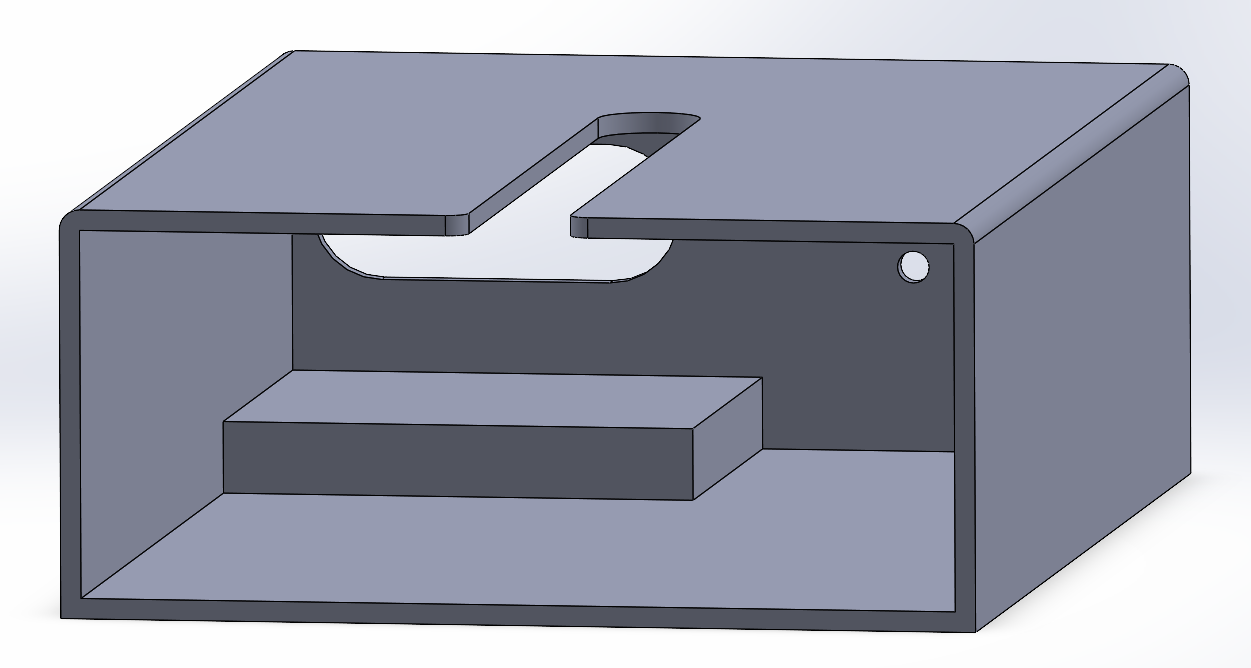
 This is what the printed device looks like with the components inside.
This is what the printed device looks like with the components inside.
Most of the functionality for my device was implemented in code on the Arduino, which is responsible for controlling the sensor and LEDs. I added computer control as a way to control the alarm function. When the device is first set up, it enters a short calibration period where it saves the nearest detected distance and uses that as the reference "alarm distance". Afterwards, if anything comes closer than the alarm distance, the device will trigger its buzzer and LEDs. At the same time, if the mute key on the keyboard is pressed, that will toggle the functioning of the LEDs and buzzer altogether.
const int xPin = A1; // Identifies the X-axis pin
const int yPin = A0; // Identifies the Y-axis pin
const int ledPin = 8; // Identifies the blue LED pin
const int buzzer = 7; // Identifies the buzzer pin
const int trig = 2; // Identifies the sensor "trig" pin
const int echo = 3; // Identifies the sensor "echo" pin
bool mute = true; // Creates a variable for "muting" the system
bool manualMute = false; // Creates a variable for manual mute control
int triggerDist = 0; // Initialize the trigger distance at 0 in
void setup() { // Setup
Serial.begin(9600); // Sets baud rate for serial usage
pinMode(ledPin, OUTPUT); // Sets the blue LED pin for output
pinMode(buzzer, OUTPUT); // Sets the buzzer pin for output
pinMode(trig, OUTPUT); // Sets the trig pin for output (sending signals)
pinMode(echo, INPUT); // Sets the echo pin for input (receiving signals)
delay(200); // Wait 200ms for sensors
while(millis() < 3000) { // 3-second calibration period
digitalWrite(trig, LOW); // Deactivate the sensor
delay(5); // Wait 5 ms
digitalWrite(trig, HIGH); // Send a ping
delay(5); // Wait 5 ms
digitalWrite(trig, LOW); // Deactivate the sensor
long calibDuration, calibInches; // Set up calibration measurement units
calibDuration = pulseIn(echo, HIGH); // Measure the sensor ping
calibInches = calibDuration / 74 / 2; // Convert the duration to a distance in inches
if (calibInches > triggerDist) { // If current distance is larger than trigger distance
triggerDist = calibInches; // Set trigger distance to current
}
}
triggerDist--; // Set trigger distance to measured - 1 inch
}
void loop() { // Main loop
if (Serial.available() > 0) { // If there is serial output
int inByte = Serial.read(); // Reads from the port
if (inByte == 1) { // If "1" is received
manualMute = !manualMute; // Toggle manual mute control
}
}
if (mute) { // If mute is true
digitalWrite(buzzer, LOW); // Set buzzer to low
digitalWrite(ledPin, LOW); // Set LED to high
digitalWrite(trig, LOW); // Deactivate the sensor
delay(5); // Wait 5 ms
digitalWrite(trig, HIGH); // Send a ping
delay(5); // Wait 5 ms
digitalWrite(trig, LOW); // Deactivate the sensor
long duration, inches; // Setup distance measurements
duration = pulseIn(echo, HIGH); // Measure the sensor ping
inches = duration / 74 / 2; // Convert the duration to a distance in inches
if (!manualMute) { // If manual mute control is off
if (inches < triggerDist) { // If the distance is less than the trigger range
mute = false; // Sets mute to false
} else { // If the distance is outside the trigger range
mute = true; // Sets mute to true
}
}
Serial.println(1); // Prints to serial
delay(50); // Wait 50 ms
} else { // If mute is false
Serial.println(2); // Prints new output to serial
digitalWrite(buzzer, LOW); // Sets buzzer to low
digitalWrite(ledPin, LOW); // Sets LEDs to low
delay(100); // Waits 100 ms
digitalWrite(ledPin, HIGH); // Sets LEDs to high
delay(100); // Waits 100 ms
digitalWrite(buzzer, HIGH); // Sets buzzer to high
digitalWrite(ledPin, LOW); // Sets LEDs to low
delay(100); // Waits 100 ms
digitalWrite(ledPin, HIGH); // Sets LEDs to high
delay(100); // Waits 100 ms
if (manualMute) { // If manualMute is true
mute = true; // Set mute to true
} else { // If manualMute is not true
mute = false; // Set mute to false
}
}
}
// Final project for HCDE 439 AUT 25
// This code is partly based on the in-class p5.js demos
const BAUD_RATE = 9600; // Sets up baud rate for serial usage
let port, connectBtn, elementSize; // Declare global variables
// Sets up the canvas
function setup() {
setupSerial(); // Runs the serial setup function
createCanvas(windowWidth, windowHeight); // Creates a canvas sized to the browser window
textFont("system-ui", 50); // Sets the font (https://p5js.org/reference/)
textStyle(BOLD); // Sets the font style to bold
textAlign(CENTER, CENTER); // Sets text center alignment
blendMode(ADD); // Sets canvas blend mode (https://p5js.org/reference/#/p5/blendMode)
}
// Creates the visuals
function draw() {
const portIsOpen = checkPort(); // Check whether the port is open (see checkPort function below)
if (!portIsOpen) return; // Return (exit the loop) if the port isn't open
let str = port.readUntil("\n"); // Read from the port until reaching a new line
if (str.length == 0) return; // Return if nothing is read
let inputStr = str.trim();
elementSize = min(windowWidth, windowHeight) * 0.3; // Limit size of the main elements
clear(); // Clear the canvas
if (inputStr == "1") { // Input is 1 if sensor is not triggered
background(0); // Black background
} else { // If the sensor is triggered
background("red"); // Red background
}
translate(windowWidth / 2, windowHeight / 2); // Move the origin to the center
fill("white"); // Sets color for text/objects
text("Press M key to toggle mute!", 0, 0); // Text for
}
function keyTyped() { // If a character key is pressed
if (key === "m") { // If the M key is pressed
port.write(1); // Write "1" to the port
}
}
// Helper function to set up the serial
function setupSerial() {
port = createSerial(); // Sets up the port
let usedPorts = usedSerialPorts(); // Getting the used ports
if (usedPorts.length > 0) { // Checks if there are any used ports
port.open(usedPorts[0], BAUD_RATE); // Opens the first used port
}
connectBtn = createButton("Connect to Arduino"); // Creates a connect button
connectBtn.position(5, 5); // Positions the button in the top left of the screen
connectBtn.mouseClicked(onConnectButtonClicked); // On click, runs onConnectButtonClicked
}
// Changes the button appearance and returns a value based on the status of the port
function checkPort() {
if (!port.opened()) { // If the port is not opened
connectBtn.html("Connect to Arduino"); // Modifies the button text
background("gray"); // Sets the background color to gray
return false; // Returns false
} else { // If the port is opened
connectBtn.html("Disconnect"); // Modifies the button text
return true; // Returns true
}
}
// Toggles opening the port when the connect button is clicked
function onConnectButtonClicked() {
if (!port.opened()) { // If the port is not opened
port.open(BAUD_RATE); // Opens the port
} else { // If the port is opened
port.close(); // Closes the port
}
}